

Project Updates
What's new with our project? Look below!



Posted: 04/01/2015
Our valve mechanics are back from the 3D printer and machine shop! We now have a fully built prototype that we are very happy with. The electronics case (with Montana Space Grant Consortium logo) houses the microcontroller board and the batteries to power everything.
We are now anxiously waiting for the weather to clear up so we can fly the prototype and see how it performs! We successfully demo'd the system to a group of other senior design students and received positive comments (thanks everyone who came!).

Posted: 03/23/2015
The team is back from their latest test flight! We hitched a ride on a high altitude balloon flight yesterday in Missoula, MT. Unfortunately we were unable to successfully change the altitude restriction on our new GPS modules. Back to the drawing board!
After performing some additional research we discovered that the new GPS chipset stores its configuration in volatile memory. Remove power and the settings reset back to their default, altitude limited mode. Bummer!
We are working on some code to communicate with the GPS chipset upon our microcontroller starting up. This should ensure that we remove the altitude restriction on every powerup.
Check out our flight track and data here.
Posted: 03/20/2015
Just in time for a BOREALIS flight this week, we've successfully built up two of the generation two prototypes. These include the new uBlox GPS chipset (see previous post) and the microSD card slot.
The new GPS includes a feature called Dynamic Platform Model which attempts to increase the accuracy of the GPS reporting based on the chipset's intended use. Unfortunately this is both a feature and a problem for us as the default mode is altitude limited like our previous chipset! We think we've figured out how to change the DPM to "altitude mode" which removes the altitude limit.
Click here to see a side by side comparison between the old and new version of our prototype.
Posted: 03/06/2015
Trevor found a great new GPS chipset which is guaranteed not to be altitude limited. Enter the uBlox PAM-7Q! This chipset is very feature rich and we've been having fun testing it at the lab. We can't wait to test it out!
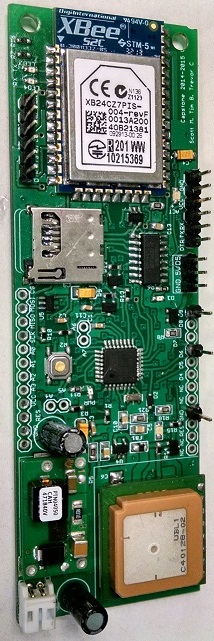
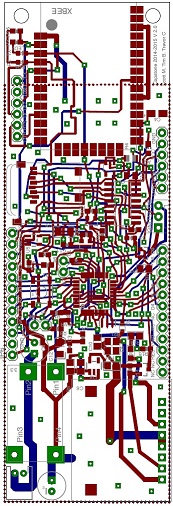
Trevor has tweaked our first PCB design to include the (much larger) new GPS chipset, which you can see in the picture at right. We also decided to include a microSD card slot for logging data (prevously we used an addon card).
All these new features only added about 8mm to the length of the boards due to a change to the XBee design. Instead of using a PCB antenna (as in our first design), we are using XBee modules with built in antennas. This saved us about 1cm of length overall!
Our team will have another chance to hitch a ride on a high altitude balloon flight to test our new GPS chipset and circuit design. On March 22nd we'll be flying a different payload out of Missoula, MT.
Posted: 03/02/2015
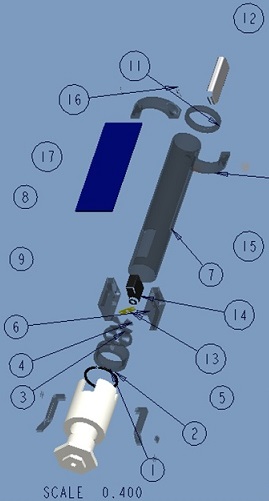
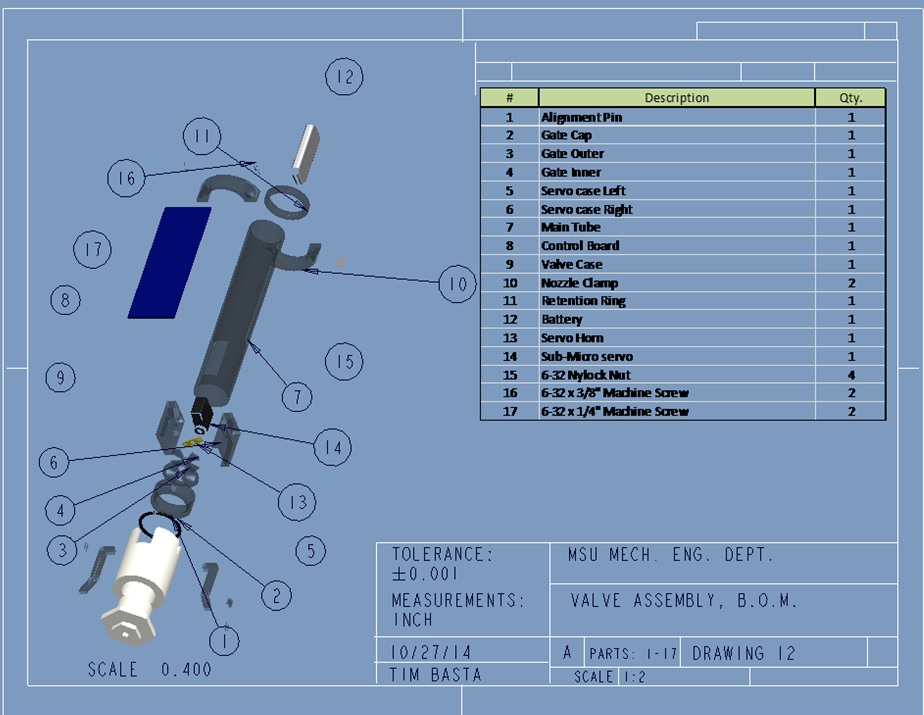
While Trevor and Scott have been investigating new GPS modules (see below news), Tim has been working hard on the cad model for our valve design. Most of the valve mechanics are made of polycarbonate so that the parts expand and contract at the same rate (temperatures on our flights go anywhere form 80 degrees F to -70 degrees F!).
We'll be 3D printing some of the parts and milling the rest on campus. The motor which activates the valve is a standard sub-micro hobby servo. These have performed well on previous flights and they are very simple to interface with our microcontroller.
Click here to see the full size version of the design!
Posted: 02/20/2015
The team is back from Tuscon, Arizona after two weeks away from school (yikes!). We had a great time with the World View team and our flight was a success on many levels (see the flight track here and move the map to Arizona). While our senior design prototype was not the main payload we flew, we stashed our prototypes onboard for testing. Check out our article with MSU News here (thanks Evelyn Boswell!).
Our primary test for the senior design prototype was sending GPS data over the wireless link between two of our boards and logging data to a microSD card. The wireless link between our units was absolutely solid throughout the entire flight despite a handful of other wireless devices being in close proximity to our boards.
Unfortunately the GPS units we had purchased from Adafruit were altitude limited at about 30,000 ft. Bummer! We will be on the lookout for an alternate GPS chipset which can guarantee high altitude performance.


Posted: 02/02/2015
Check out our first prototype build! Our PCBs arrived and we were able to assemble a few complete boards to test everything out. For the curious the microcontroller is an Atmel ATMega 328p, the same microcontroller used by the Arduino Uno! Also present is a GPS chipset from Adafruit, a Texas Instruments DC/DC power board, and a XBee 2.4 GHz wireless radio modem. Sweet!
In somewhat related news our team will be traveling to Arizona to fly a payload with World View Experience. World View wants to fly passengers to the edge of space, and they are letting us hitch a ride on one of their test flights (thanks guys)! We'll be testing our senior design project on their flight to see how it performs.
Posted: 01/18/2015
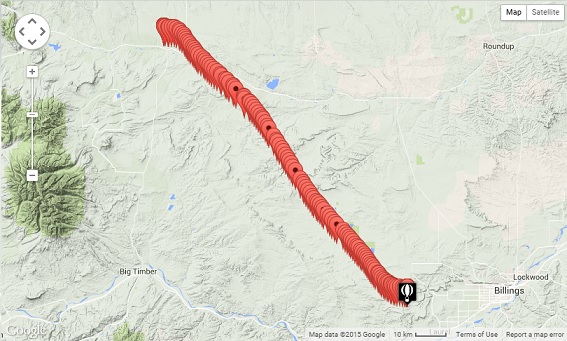
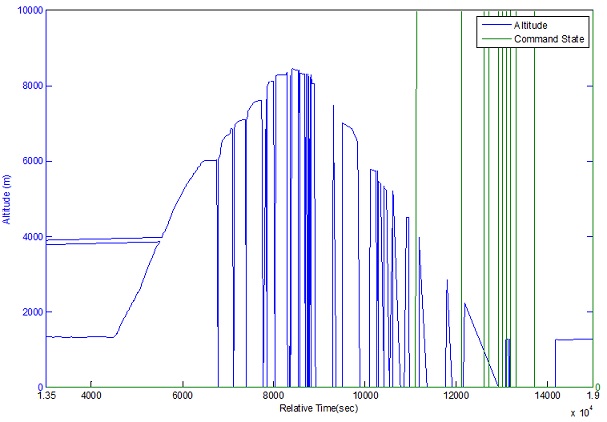
We successfully flew a prototype version of the valve and control electronics! We were able to reach neutral buoyancy after approximately 6.5 minutes of venting, bringing us to float at 27,000 feet ASL. The upper level winds were blowing very hard so we terminated the flight after several minutes of floating so we wouldn't end up in Billings, MT.
The image above shows our flight path after launching from Harlow, MT. As you can see we almost landed in Billings, MT! Click here to interact with or view the data from that flight.
The below image shows a vertical profile of the altitude versus relative time. The peak at the top corresponds to our float for several minutes. Any jagged lines you see are times when our GPS lost its tracking for a moment.
Posted: 12/02/2014
We've posted the last few items remaining for this semester to our documents page.
Additional information about our previous valve system has been posted to the project background page. Check it out!

Posted: 11/01/2014
We've posted updated documents to the Documents page! We will continue to update the documents page as we progress through the semester. At the end of the Fall 2014 semester we will post our Final Report.
Posted: 10/15/2014
We have created the first draft of our project website! We will be posting our progress to this website as our helium valve project begins to take shape. Keep watching for additional content!
If you are interested we are using the Bootstrap framework in the design of our project website. Bootstrap was developed by Twitter for the formatting of their site, so you might recognize the familiar flat syle. Our previous webpage (image on the right) also utilized Bootstrap, so we decided to stick with what we know.
{kind=link}
{kind=link}